Беспілотная пуцявая сістэма цягання падземных шахт

Сістэмныя функцыі
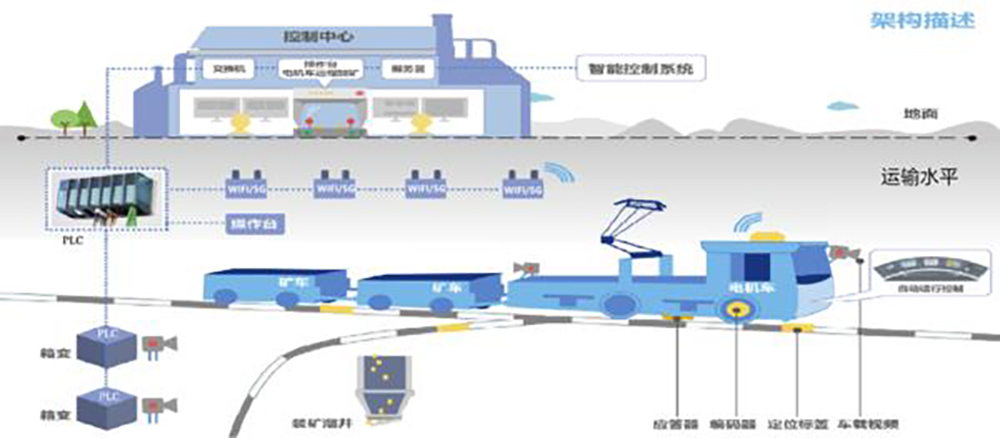
Сістэма электравоза без машыніста складаецца з сістэмы аўтаматычнага кіравання (ATO), блока кіравання PLC, блока дакладнага пазіцыянавання, інтэлектуальнага блока раздачы, блока бесправадной сеткі сувязі, блока цэнтралізаванага кіравання закрыццём сігналу перамыкача, відэаманіторынгу і відэа AI сістэмы і цэнтр кіравання.
Кароткае апісанне функцыі
Цалкам аўтаматычны круізны рэжым:згодна з тэорыяй крэйсерскай хуткасці з фіксаванай хуткасцю, у адпаведнасці з рэальнай сітуацыяй і патрабаваннямі ў кожнай кропцы транспартнага ўзроўню крэйсерская мадэль транспартнага сродку пабудавана для рэалізацыі аўтаномнага рэгулявання хуткасці руху лакаматыва.
Дакладная сістэма пазіцыянавання:дакладнае пазіцыянаванне лакаматыва дасягаецца з дапамогай тэхналогіі сувязі і тэхналогіі распазнання маякоў і г.д., з аўтаматычным уздымам носа і аўтаномнай рэгуляваннем хуткасці.
Інтэлектуальная дыспетчарызацыі:Дзякуючы збору даных, такіх як узровень матэрыялу і гатунак кожнага жолаба, а затым у залежнасці ад становішча ў рэальным часе і працоўнага стану кожнага лакаматыва, лакаматыў аўтаматычна прызначаецца для працы.
Аддаленая ручная загрузка:Дыстанцыйная ручная загрузка можа быць дасягнута на паверхні шляхам кіравання пагрузачным абсталяваннем.(Дадатковая цалкам аўтаматычная сістэма загрузкі)
Выяўленне перашкод і абарона бяспекі:Дадаўшы перад аўтамабілем высокадакладную радарную прыладу для выяўлення людзей, транспартных сродкаў і камення, што падае перад аўтамабілем, каб забяспечыць бяспечную дыстанцыю да транспартнага сродку, транспартны сродак аўтаномна выконвае шэраг аперацый, такіх як агучванне гудок і тармажэнне.
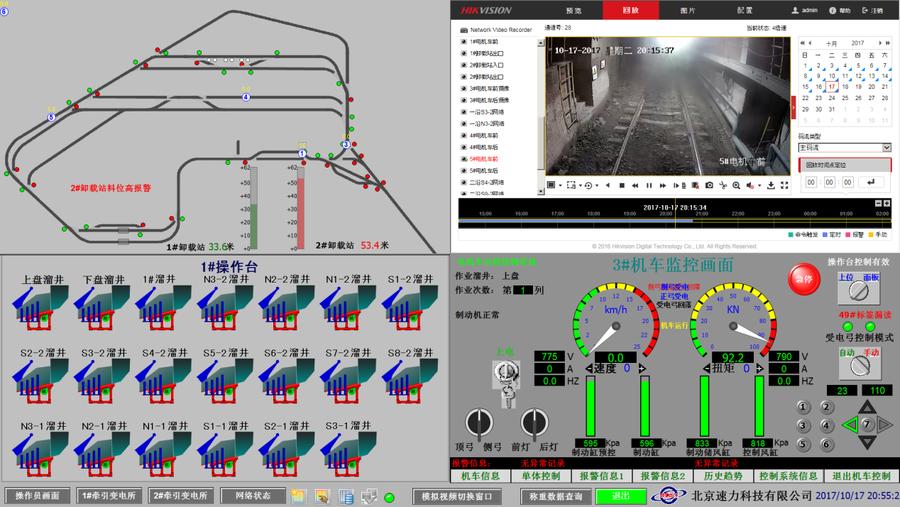
Функцыя статыстыкі вытворчасці:Сістэма аўтаматычна выконвае статыстычны аналіз хадовых параметраў лакаматыва, траекторый ходу, журналаў каманд і завяршэння вытворчасці для фарміравання справаздач аб ходзе вытворчасці.
Асноўныя моманты сістэмы.
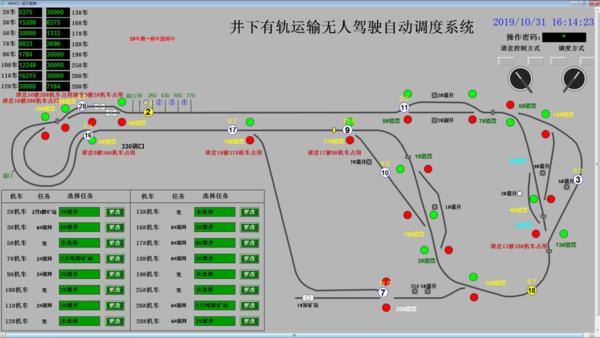
Аўтаматычная праца сістэм падземнага чыгуначнага транспарту.
Піянерскі новы рэжым працы падземнага лакаматыва без машыніста.
Рэалізацыя сеткавага, лічбавага і візуальнага кіравання сістэмамі падземнага чыгуначнага транспарту.

Аналіз эфектыўнасці сістэмы
Пад зямлёй без нагляду, аптымізацыя вытворчых мадэляў.
Рацыяналізацыя колькасці працуючых і зніжэнне выдаткаў на працоўную сілу.
Паляпшэнне працоўнага асяроддзя і павышэнне ўласнай бяспекі.
Інтэлектуальныя аперацыйныя механізмы для кіравання зменамі.
Эканамічныя выгады.
-Эфектыўнасць:павышэнне прадукцыйнасці з адным лакаматывам.
Стабільная вытворчасць дзякуючы разумнаму размеркаванню руды.
-Персанал:машыніст паравоза і аператар міннага выпуску ў адным.
Адзін рабочы можа кіраваць некалькімі лакаматывамі.
Скарачэнне колькасці асабістага складу на пасадах у пункце разгрузкі шахты.
-Абсталяванне:зніжэнне кошту ўмяшання чалавека на абсталяванне.
Перавагі кіравання.
Аналіз дадзеных аб абсталяванні для таго, каб зрабіць папярэдняе абслугоўванне абсталявання і знізіць выдаткі на кіраванне абсталяваннем.
Паляпшэнне вытворчых мадэляў, аптымізацыя персаналу і скарачэнне выдаткаў на кіраванне персаналам.





